The Memory Hierarchy
CSC 235 - Computer Organization
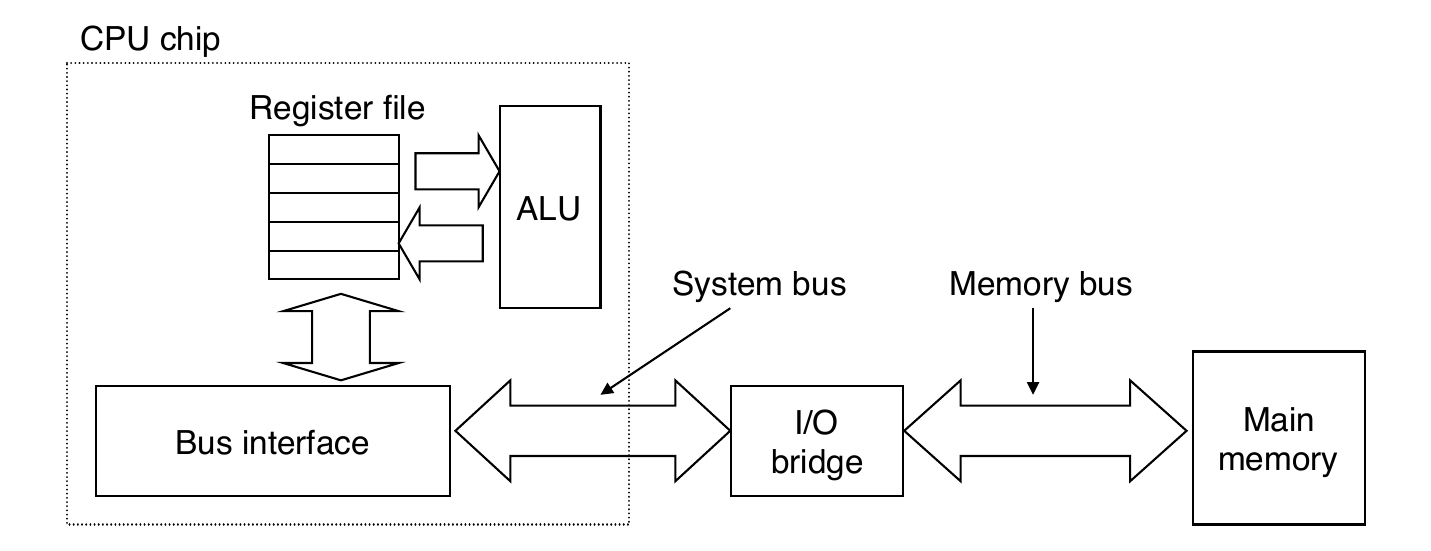
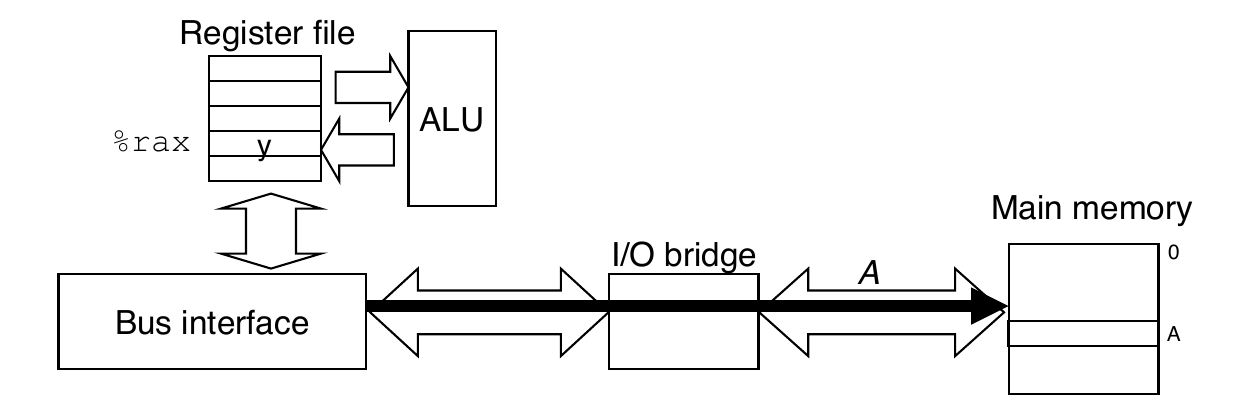
Traditional Bus Structure Connecting CPU and Memory
A bus is a collection of parallel wires that carry address, data, and control signals
Buses are typically shared by multiple devices
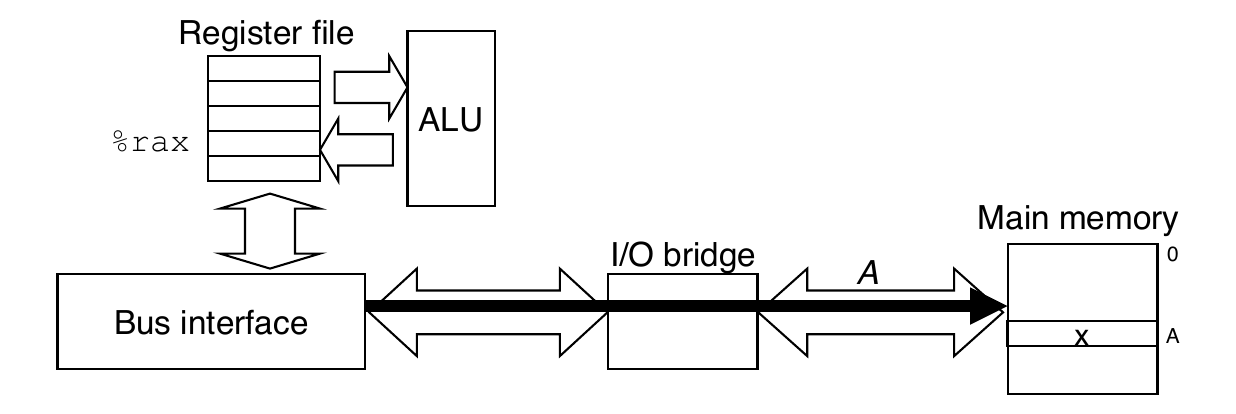
Memory Read Transaction (1)
Example:
movq A, %raxCPU places address A on the memory bus
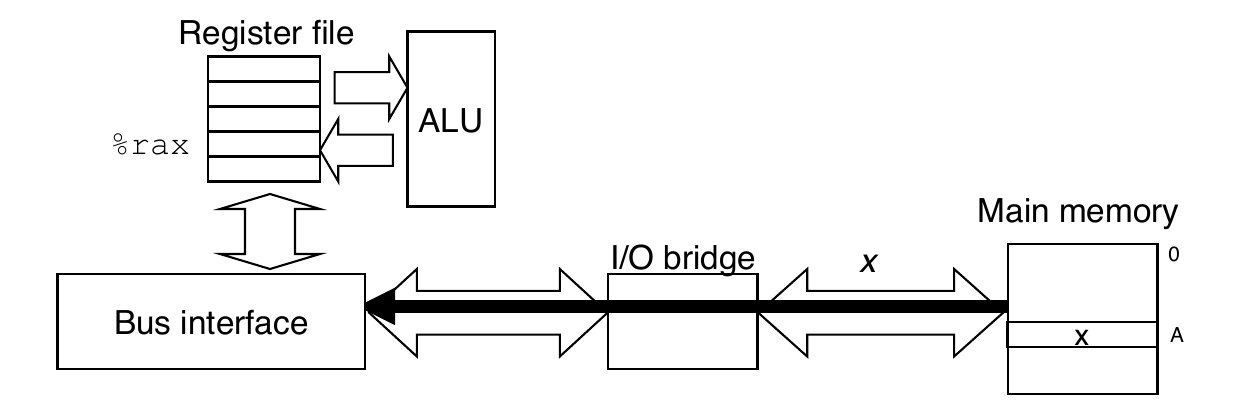
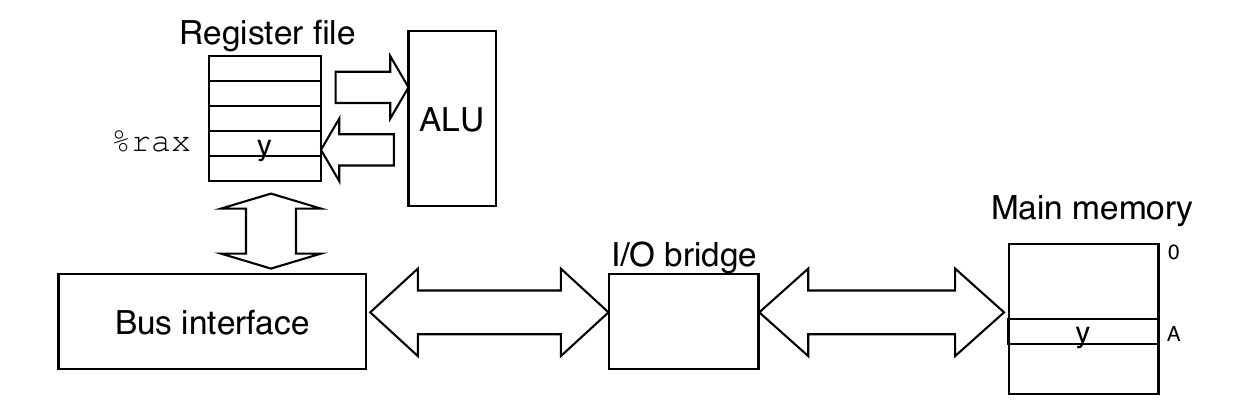
Memory Read Transaction (2)
Example:
movq A, %raxMain memory reads A from the memory bus, retrieves word x, and places it on the bus
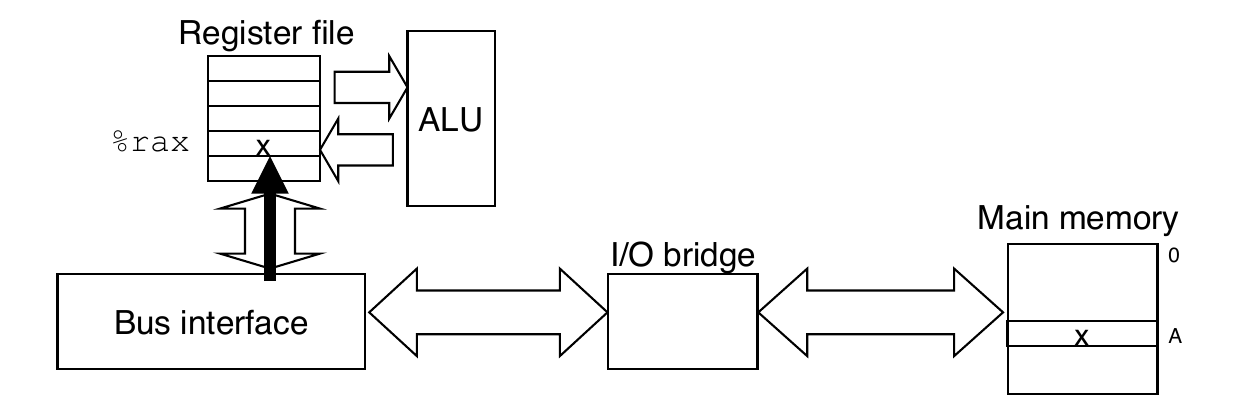
Memory Read Transaction (3)
Example:
movq A, %raxCPU read word x from the bus and copies it into register
%rax
Memory Write Transaction (1)
Example:
movq %rax, ACPU places address A on the memory bus; main memory reads it and waits for the corresponding data word to arrive
Memory Write Transaction (2)
Example:
movq %rax, ACPU places data word y on the bus
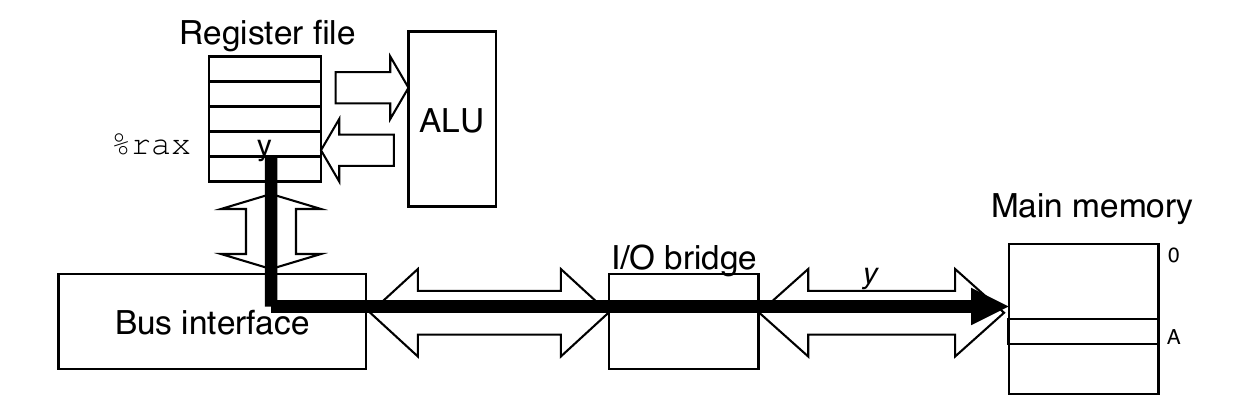
Memory Write Transaction (2)
Example:
movq %rax, AMain memory reads data word y from the bus and stores it at address A
Conventional DRAM Organization
- \(d \times w\) DRAM
- \(d \cdot w\) total bits organized as \(d\) supercells of size \(w\) bits
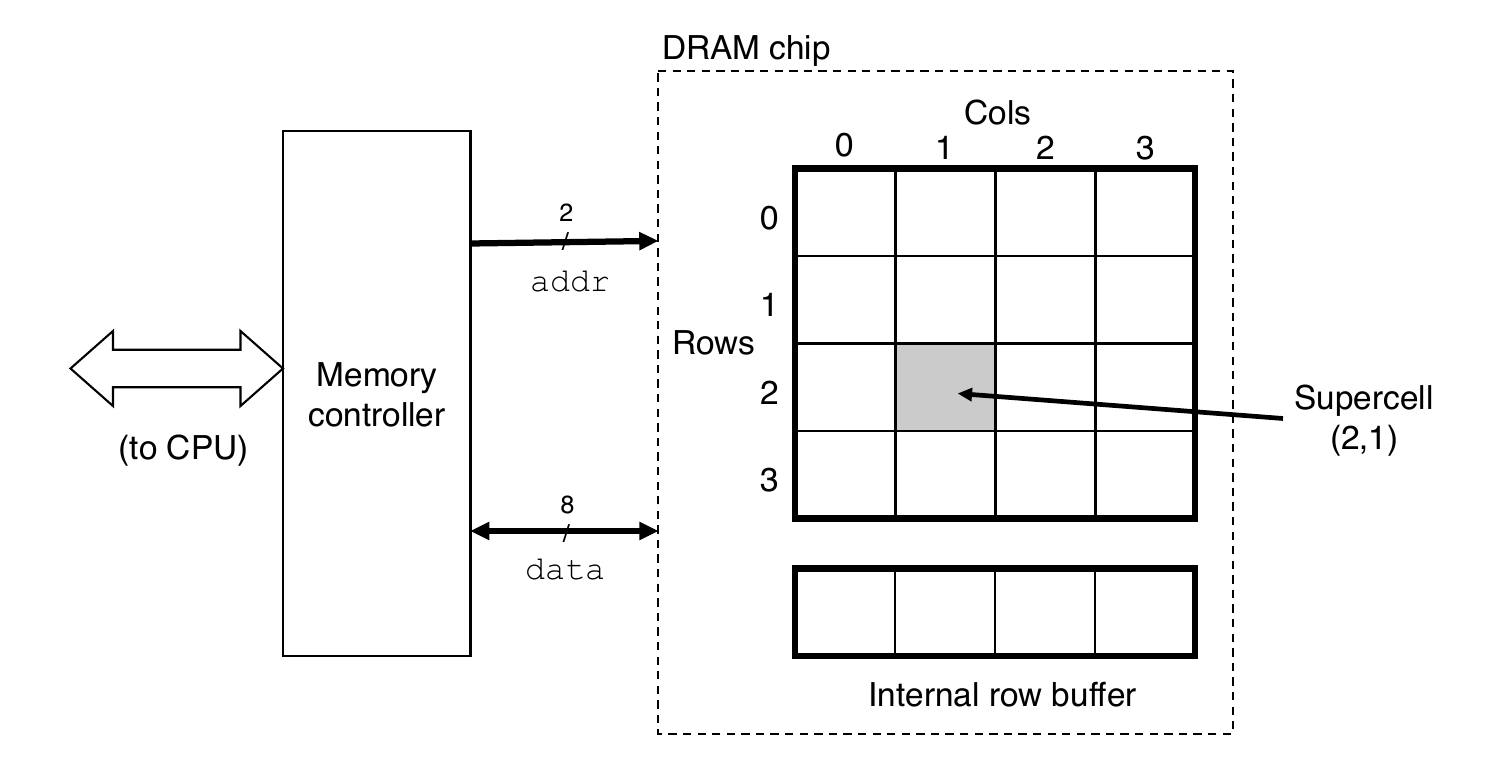
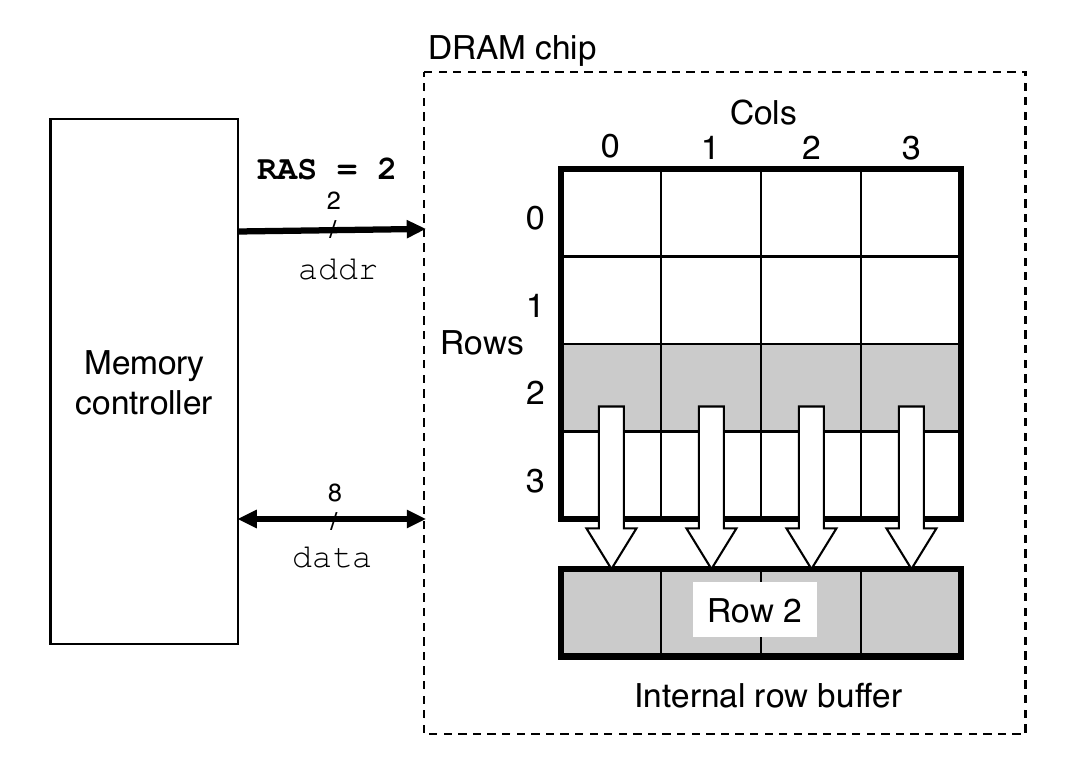
Reading DRAM Supercell (2,1)
- Step 1(a): Row access strobe (RAS) selects row 2
- Step 1(b): Row 2 copied from DRAM array to row buffer
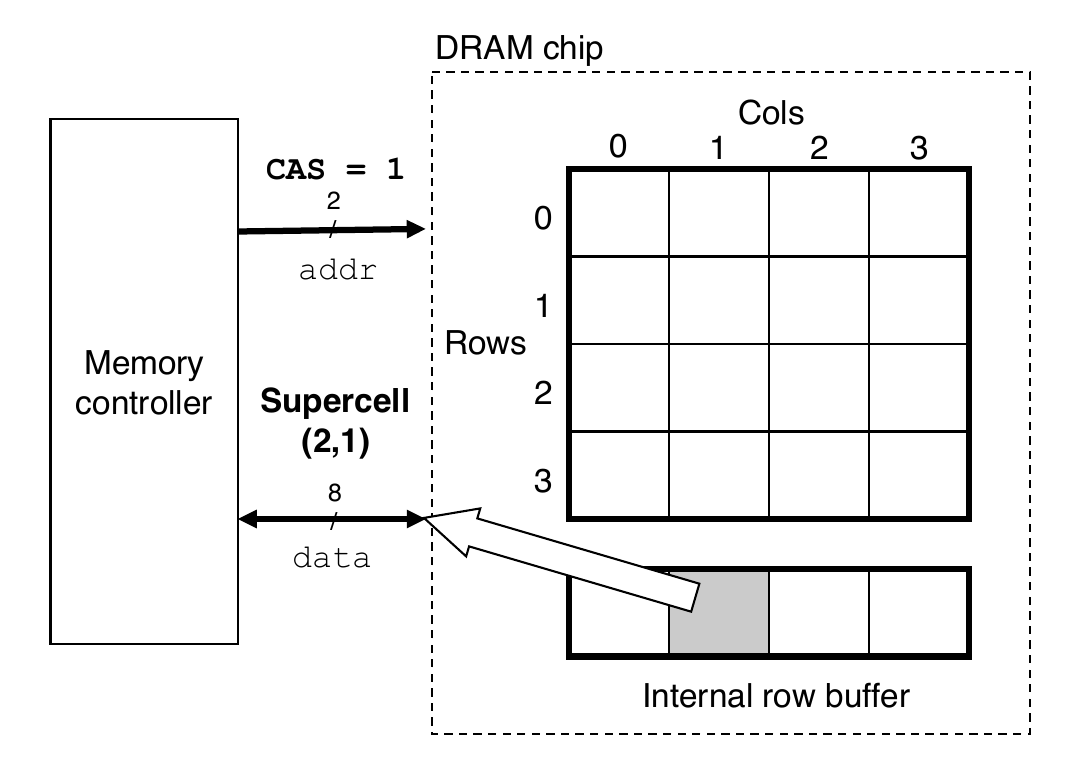
Reading DRAM Supercell (2,1)
- Step 2(a): Column access strobe (CAS) selects column 1
- Step 2(b): Supercell (2,1) copied from buffer to data lines, and eventually back to the CPU
- Step 3: All data written back to row to provide refresh
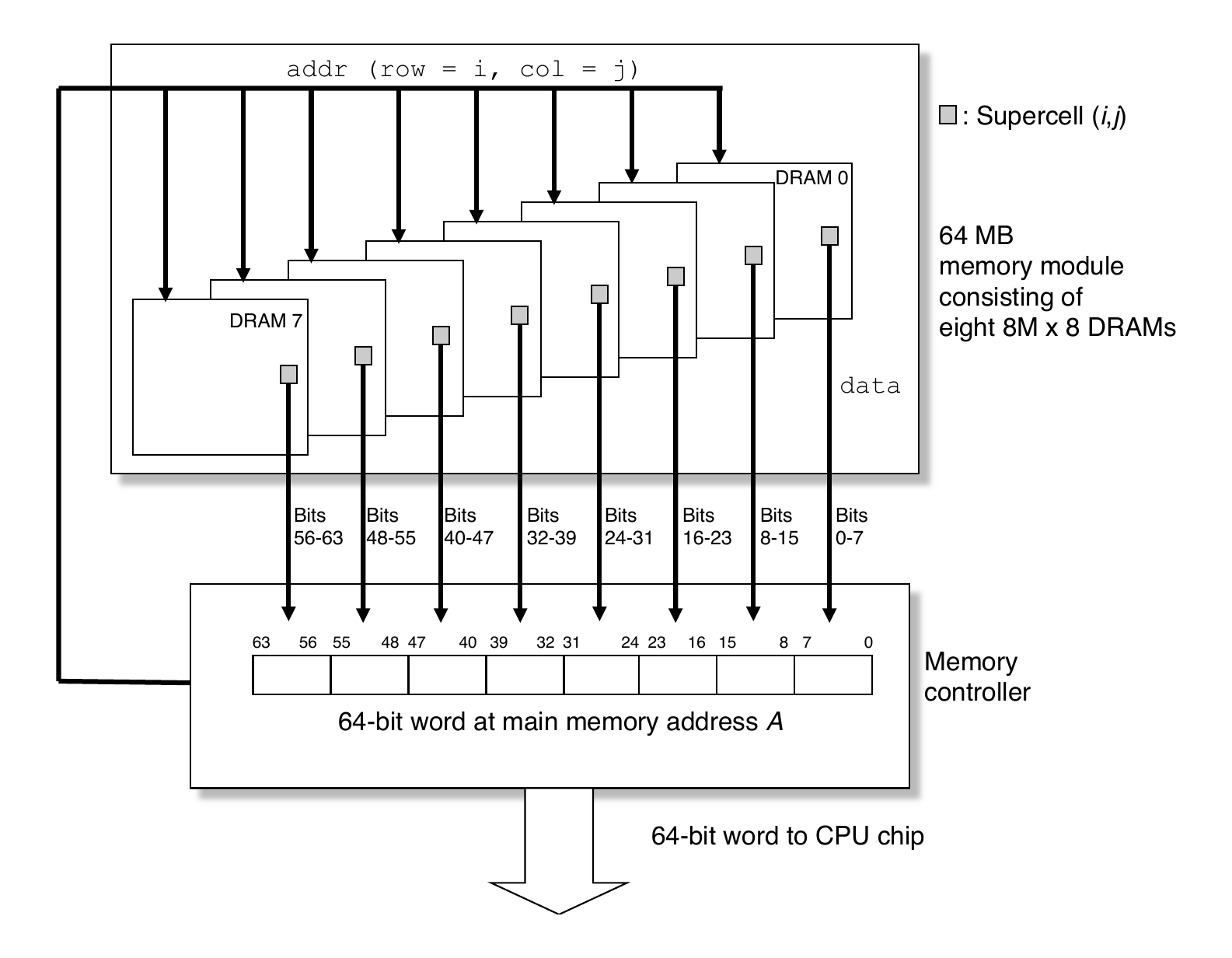
Memory Modules
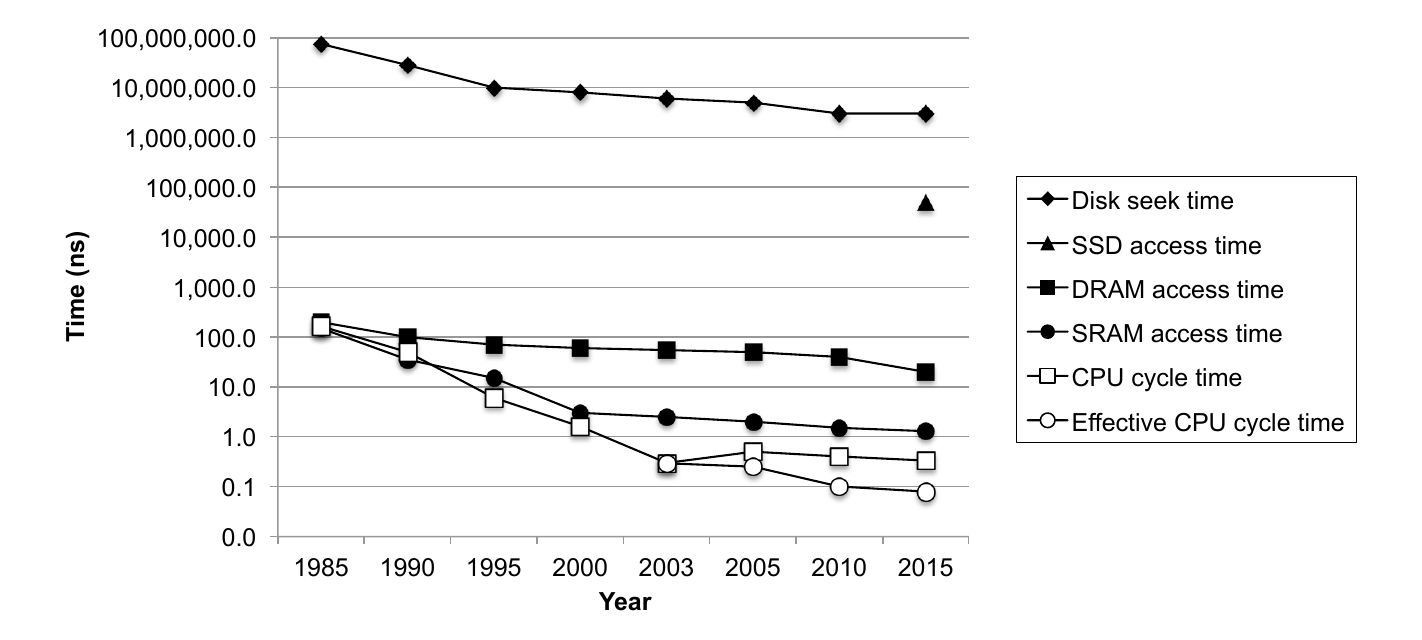
The CPU-Memory Gap
- The gap widens between DRAM, disk, and CPU speeds
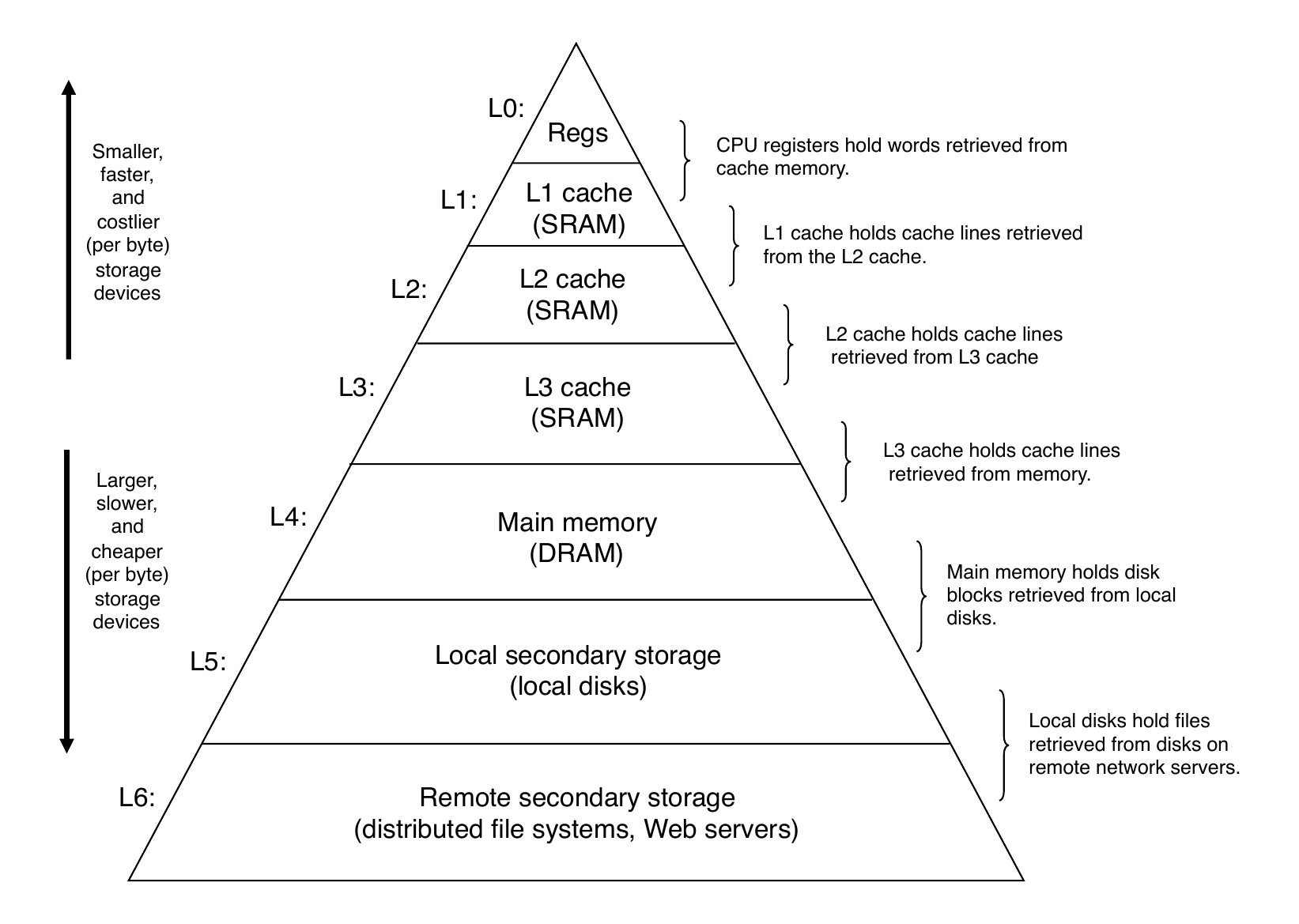
Example Memory Hierarchy
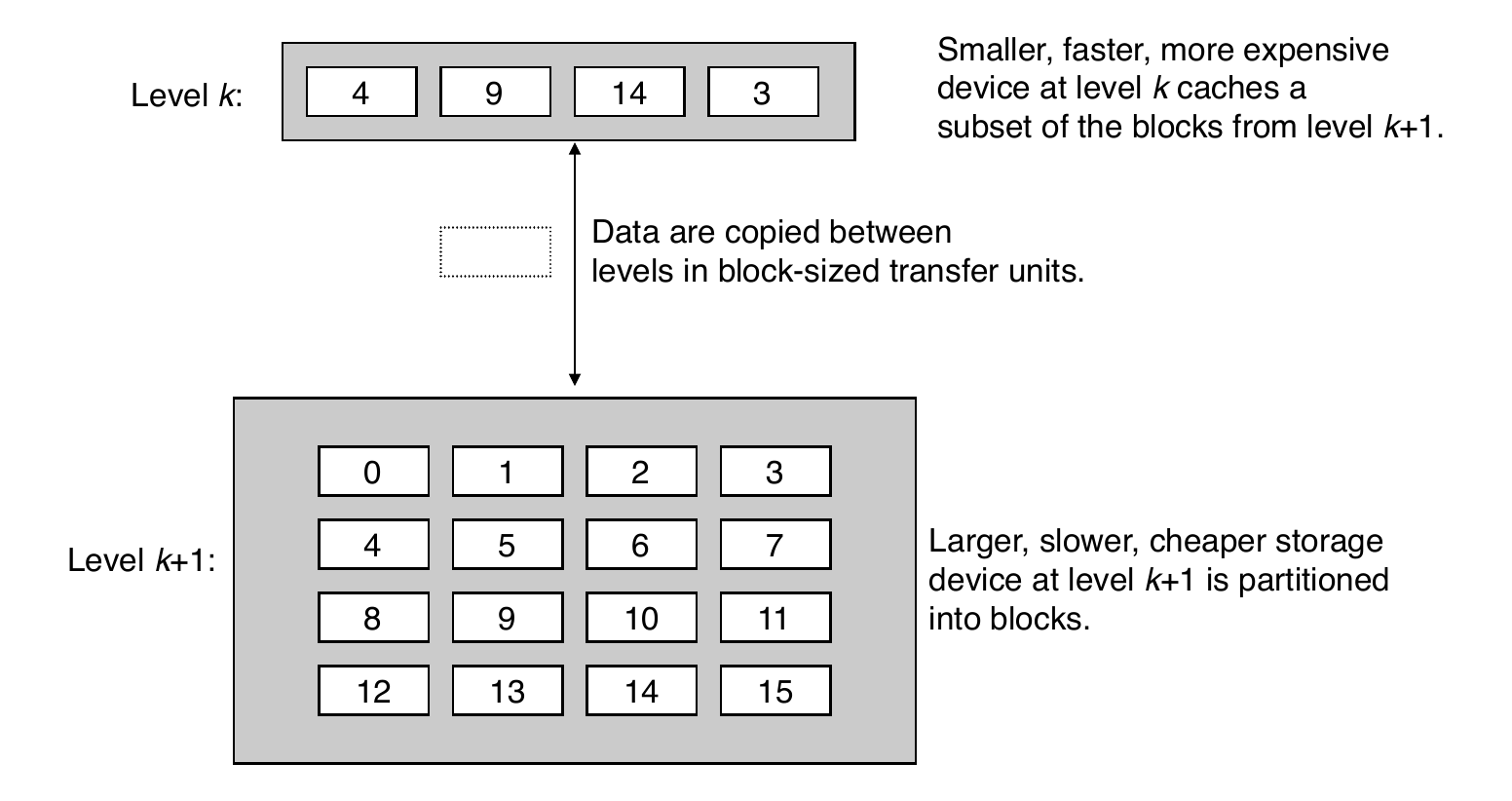
General Cache Concepts
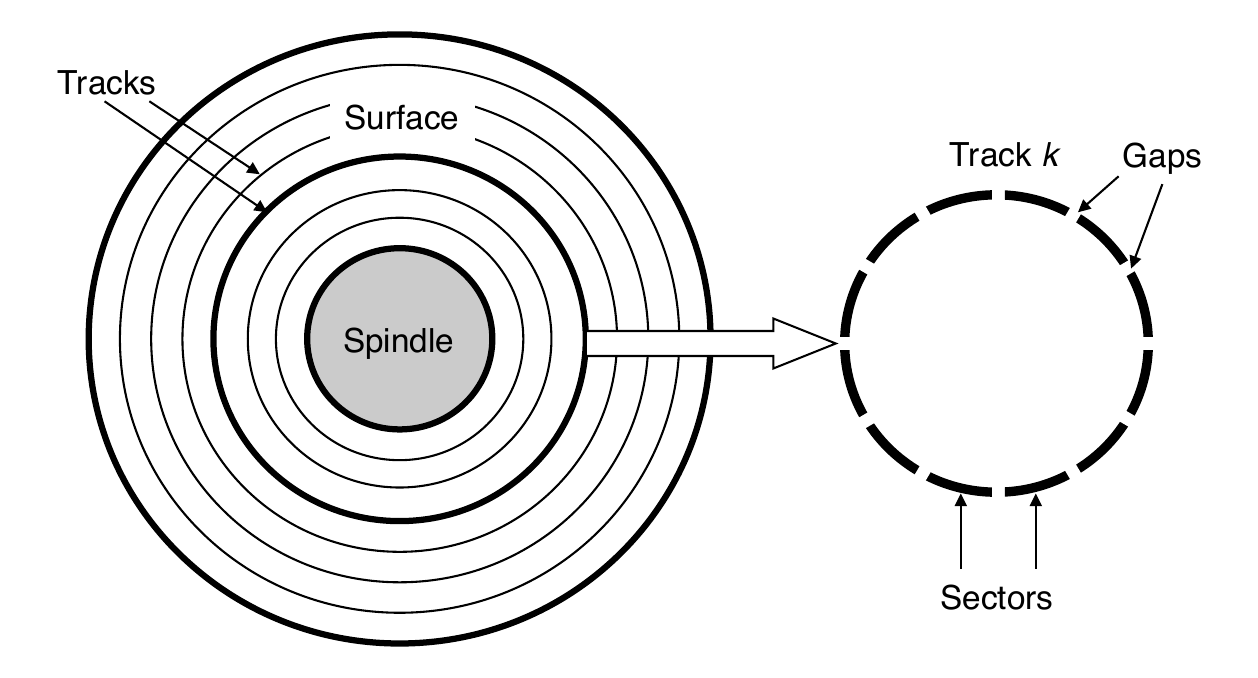
Disk Geometry
- Disks consist of platters, each with two surfaces
- Each surface consists of concentric rings called tracks
- Each track consists of sectors separated by gaps
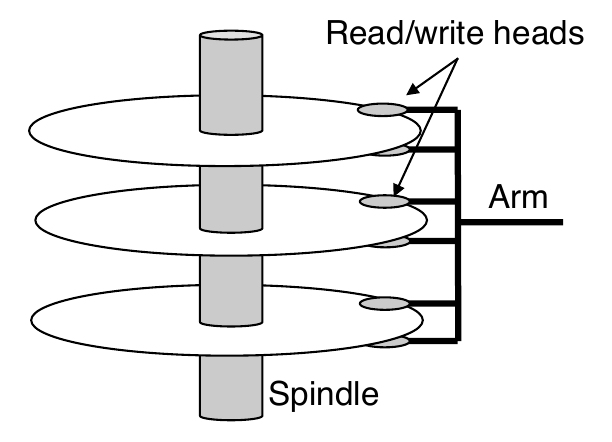
Disk Operation

Disk Operation
I/O Bus

Reading a Disk Sector (1)
- CPU initiates disk read by writing a command, logical block number, and destination memory address to a port (address) associated with the disk controller

Reading a Disk Sector (2)
- Disk controller reads the sector and performs a direct memory access (DMA) transfer into main memory

Reading a Disk Sector (3)
- When the DMA transfer completes, the disk controller notifies the CPU with an interrupt

Solid State Disks (SSDs)
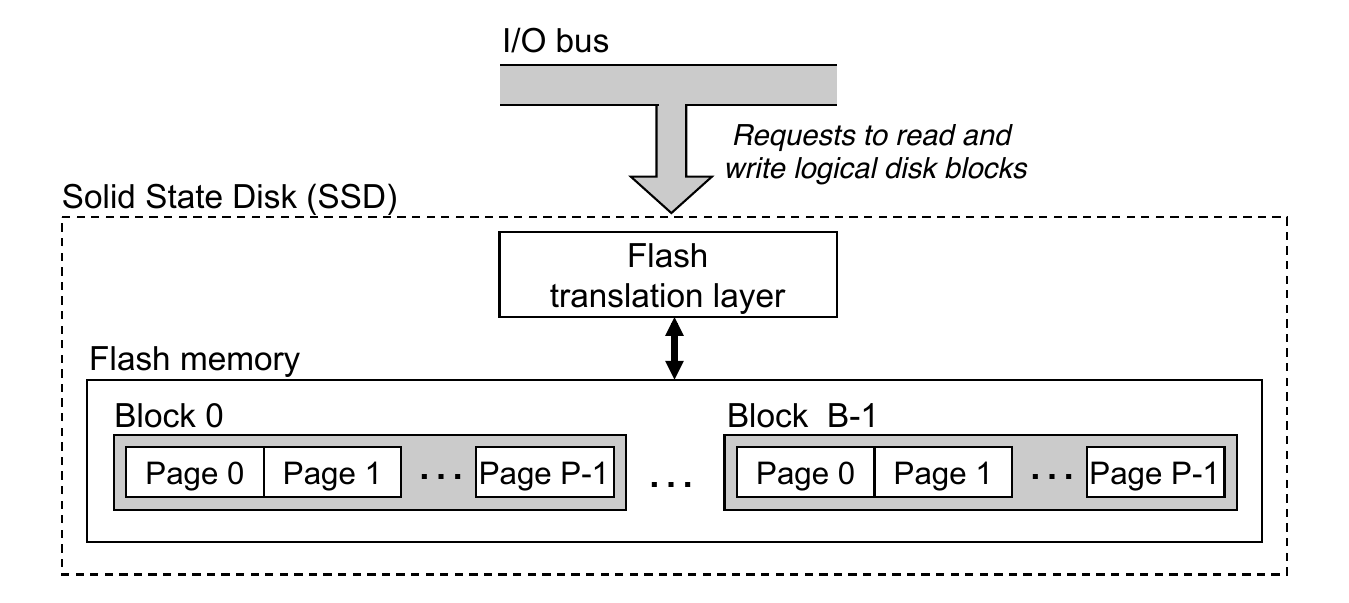
- Pages: 512KB to 4KB, Blocks: 32 to 128 pages
- Data read/written in units of pages
- Page can be written only after its block has been erased
- A block wears out after about 100,000 repeated writes