Overview
CSC 447 - Artificial Intelligence I
What is Artificial Intelligence?
Computational models of human behavior?
(Programs the behave externally like humans)Computational models of human thought?
(Programs that operate internally the way humans do)Computational systems that behave intelligently?
(What does it mean to behave intelligently?)Computational systems that behave rationally.
AI applications
Agents
An agent is software that gathers information about an environment and takes actions based on that information.
Examples:
a robot
a factory
a traffic control system
...
Agents and the Environment
- Formalizing the problem of building an agent.
![image]()
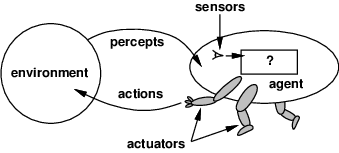
World Model
\(\mathcal{A}\) - the action space
\(\mathcal{P}\) - the percept space
\(\mathcal{E}\) - the environment: \(\mathcal{A}* \rightarrow \mathcal{P}\)
\(\mathcal{S}\) - the internal state (may not be visible to agent)
\(\mathcal{S} \rightarrow \mathcal{P}\) - the perception function
\(\mathcal{S} \times \mathcal{A} \rightarrow \mathcal{S}\) - the world dynamics
Agent Design
\(\mathcal{U}\) - utility function: \(\mathcal{S} \rightarrow \mathbb{R}\) (or \(\mathcal{S}^* \rightarrow \mathbb{R}\))
The agent design problem: find \(\mathcal{P}^* \rightarrow \mathcal{A}\)
The agent function maps percept histories to actions.
The agent function should maximize the utility of the resulting sequence of states.
Rationality
A rational agent chooses whichever action maximizes the expected value of the performance measure given the percept sequence to date.
In other words, a rational agent takes actions it believes will achieve its goals
Rational \(\neq\) omniscient
- percepts may not supply all relevant information
Rational \(\neq\) clairvoyant
- action outcomes may not be as expected
Hence, rational \(\neq\) successful
Rational \(\Rightarrow\) exploration, learning, autonomy
Limited Rationality
Problem: the agent may not be able to compute the best action (subject to its beliefs and goals).
So, we want to use limited rationality: “acting in the best way you can subject to the computational constraints that you have”
The (limited rational) agent design problem: find \(\mathcal{P}^* \rightarrow \mathcal{A}\)
mapping of sequences of percepts to actions
maximizes the utility of the resulting sequence of states
subject to our computational constraints
Thinking
Is finding \(\mathcal{P}^* \rightarrow \mathcal{A}\) AI? Aren’t the agents supposed to think?
Why is it useful to think? If you were endowed with an optimal table of reactions (\(\mathcal{P}^* \rightarrow \mathcal{A}\)) why do you need to think?
Problem: the table is too big; there are too many world states and too many sequences of percepts.
In some domains, the required reaction table can be specified compactly.
In other domains, we can take advantage of the fact that most things that could happen do not actually happen in practice.
Learning
Learning is useful when the agent does not know much about the initial environment or the environment can change.
An agent can use sequences of percepts to estimate missing details in the world dynamics.
Learning is similar to perception; they both find out about the world based on experience.
Perception – short time scale
Learning – long time scale
Specifying the Task Environment
A task environment is the “problem” that the rational agent is a “solution” for.
Specifying a task environment (PEAS)
Performance measure
Environment
Actuators
Sensors
Example Task Environment Specification
Taxi driver agent
Performance measure? safe, fast, legal, comfortable trip, maximize profits
Environment? roads, traffic, pedestrians, customers
Actuators? steering, accelerator, brake, signal, horn
Sensors? cameras, sonar, GPS, odometer, ...
Properties of Task Environments
Fully Observable vs. Partially Observable
- Can you observe the state of the world directly?
Deterministic vs. Stochastic
- Does an action map one state to a single other state?
Episodic vs. Sequential
- Do current decisions affect future decisions?
Static vs. Dynamic
- Can the world change while you are thinking?
Discrete vs. Continuous
- Are percepts and actions discrete or continuous?
Single agent vs. Multiagent
- Does an agent need to consider the actions of other agents?
Example Task Environments
| Solitaire | Backgammon | Internet shopping | Taxi | |
|---|---|---|---|---|
| Observable? | Yes | Yes | No | No |
| Deterministic? | Yes | No | Partly | No |
| Episodic? | No | No | No | No |
| Static? | Yes | Semi | Semi | No |
| Discrete? | Yes | Yes | Yes | No |
| Single-agent? | Yes | No | Yes | No |
The environment type largely determines the agent design.
Agent Types
Four basic agent types in increasing generality.
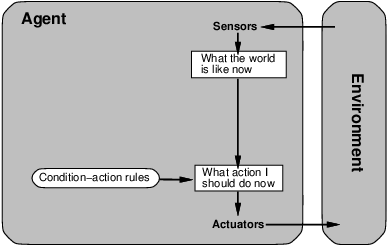
simple reflex agents
reflex agents with state
goal-based agents
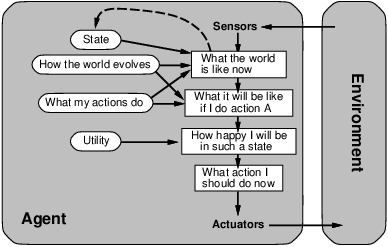
utility-based agents
All the basic agent types can be turned into learning agents.
Simple Reflex Agents
Reflex Agents with State

Goal-Based Agents

Utility-Based Agents
Learning Agents
